|
理想与鸿蒙的Agent路线之争:两种车载智能技术路径的对赌发表时间:2026年05月11日 来源:新浪汽车
当前,汽车行业的竞争焦点正从智能驾驶的“安全送达”转向智能座舱的“体验升维”。真正的核心战场,在于谁能率先让汽车成为一个能够感知、决策并主动服务的“智能体”(Agent)。在这场竞争中,鸿蒙智行与理想汽车代表了两种截然不同的技术哲学与路线选择。
一、架构分野:“指挥塔”与“全能执行官”鸿蒙的MoLA 2.0架构奉行经典的“大脑+小脑”模式。其云端“大脑”如同指挥塔,负责理解、拆解和调度任务,然后将具体指令派发给各个垂域“小脑”执行。这种分层设计使鸿蒙座舱天然成为一个服务分发平台,易于接入第三方能力,生态边界广阔。 理想的StreamingClaw架构则选择了更“重”的路径。它追求“流式感知-决策-执行”的端到端闭环,传感器数据实时汇入,系统必须即时处理。理想构建了以“自规划调度”为核心的多代理协同机制,其主代理不仅是指挥官,还必须亲身参与感知与决策。 简言之,鸿蒙构建了一个高效的“任务调度中心”,而理想则试图将整车锤炼成一个统一的“具身实体”。
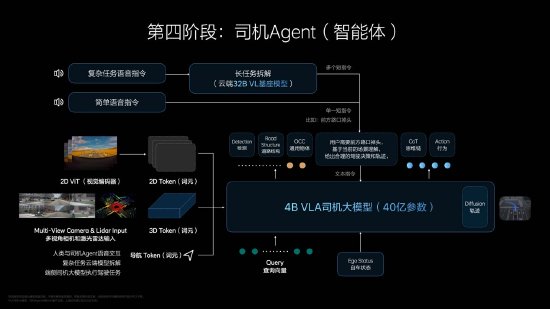
二、路径依赖:写在基因里的开发风格两者在Agent上的选择,与其在智能驾驶技术上的路线差异如出一辙。 理想将其在智驾上践行的端到端与VLA(视觉-语言-动作)模型思路延续至Agent领域,目标直指“物理世界的通用智能体”,追求感知和行动在同一模型内完成。 华为则延续其“世界模型”与仿真寻优的安全架构思维,先在虚拟空间中预演未来,再选择最优策略下达给实体执行,本质上是一种“生成-寻优-预测”模式。 双方都深陷各自多年技术投入形成的“沉没成本”与思维定式,这让当前的竞争格局更像一场无法回头的对赌。
三、终局推演:时间窗口与生态锁定赌注的份量截然不同:
理想的胜算在哪里? 理想真正的目标,或许并非在“应用生态”的广度上与鸿蒙对决,而是赌其能在“物理智能”的纵深上建立起足够深的护城河。其战略是,在鸿蒙完成从“生态广”到“体验深”的升级之前,抢先让用户感知并认可“整车即Agent”的独特价值,形成牢固的认知壁垒。 理想成功的关键在于时间窗口——尽快让用户感知并认可其Agent的独特价值。任何新事物,人们总是倾向于记住第一个提出者和践行者。利用这一优势,理想作为汽车品牌存续是没问题的。 风险同样明显: 如果在理想形成认知壁垒之前,鸿蒙的Agent已形成生态锁定,那么理想的差异化体验优势将面临对标和消解的风险。即使在最乐观的情况下,理想也无法颠覆鸿蒙生态。它所能争取的,是在鸿蒙生态覆盖不到的、对物理交互有极致需求的场景中,为用户提供一个深度集成的、可能需要付费的“整车Agent”技术选项。
四、行业启示这并非一场简单的“1V1”决斗。这是所有押注自研AI体系的新势力,共同面临的一场与时间和技术纵深赛跑的游戏。车端Agent的竞争,从概念到用户体验的漫长战争,才刚刚打响。 对于汽车租赁行业而言,这一技术路线的演进值得持续关注。未来,具备强大Agent能力的车型可能在用户体验、运营效率(如自动泊车、自主充电等)方面带来新的可能性,进而影响租赁车型的选择标准和客户偏好。 |








- 1
- 2
- 3
- 4
- 5
- 6
- 7